



1:1 축 매핑: 가상 공간에 256개 이상의 서보 모터 미러링
충돌 방지: 적재 전 간섭 위험 감지
예술적 미리보기: 조명/미디어 동기화를 통해 복잡한 움직임을 시각화합니다.
| 전통적인 방법 | 판도 3D 솔루션 |
|---|---|
| 몇 주간의 현장 디버깅 | 오프라인 가상 리허설 |
| 시행착오적 조정 | 정확한 첫 번째 실행 |
| 제한된 사전 시각화 | 풀 3D 쇼 시뮬레이션 |
무대 기계 프로그래밍의 미래 - 가상 설계부터 완벽한 실행까지
"라이브 엔터테인먼트를 위한 디지털 트윈"
Pando 3D는 다음과 같은 획기적인 워크플로우를 개척합니다.
✅ 가상 축 완벽한 거울 물리적 모터 (EtherCAT/PLC를 통해)
✅ 객체 기반 제어 수동 모터 조작을 대체합니다
✅ 전체 쇼 라이프사이클 디자인부터 성능까지 커버
| 전통적인 접근 방식 | 판도 3D 어드밴티지 |
|---|---|
| 직접 모터 제어 | 객체 모양 조작 |
| 축별 프로그래밍 | 그룹 이동 사전 설정 |
| 물리적 시행착오 | 위험 없는 가상 검증 |
주요 특징:
256개 이상의 물리적 모터 동기화
사전 설정 모션 라이브러리(파도, 나선, 리프트)
빠른 리깅을 위한 매트릭스/원형 어레이 도구
타임라인 편집기
드래그 앤 드롭 키프레임 애니메이션
다축 조정 시각화
자동 충돌 감지
디버깅 모음
자동 수정으로 초과 경고 제한
동기화 편차 분석
현장 디버깅 시간 90% 단축
지원 기기:
터치스크린 콘솔(21.5인치 1080P)
태블릿 및 스마트폰(iOS/Android)
데스크톱 워크스테이션
원격 협업:
클라우드 기반 프로젝트 공유
다중 사용자 권한 계층
실시간 공동 편집
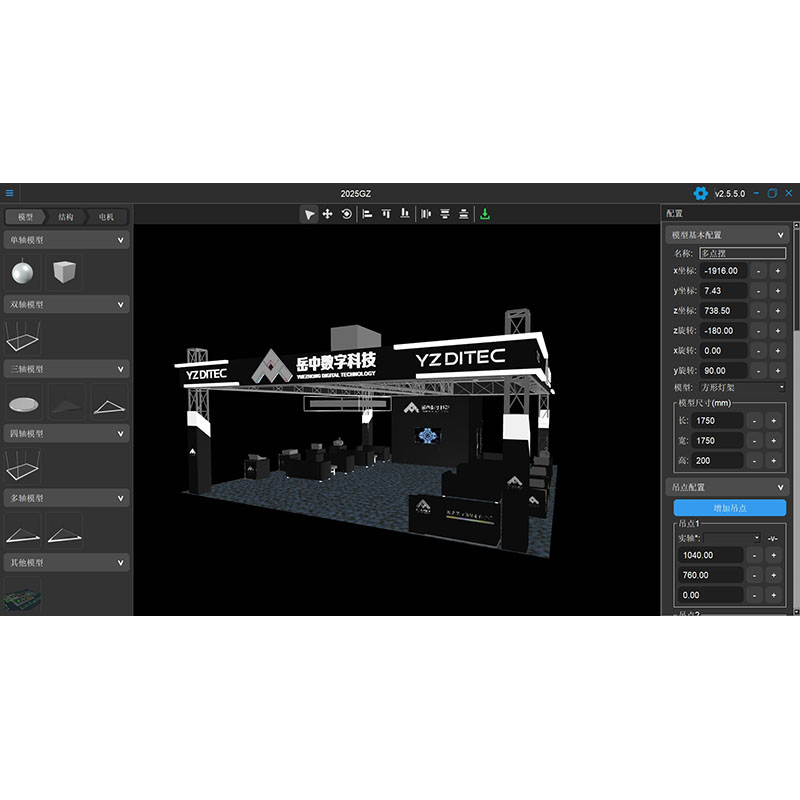
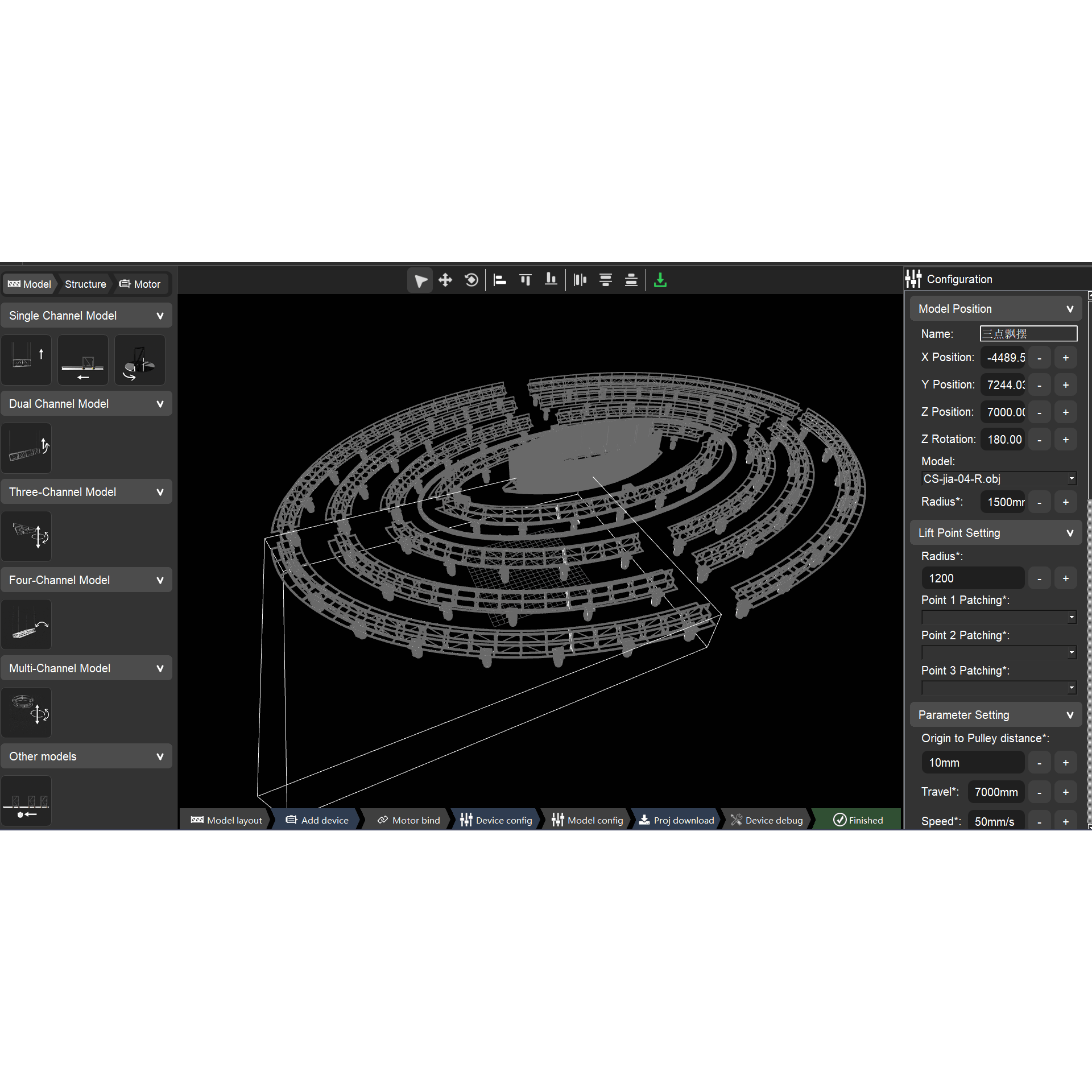
구성 플랫폼

Config 플랫폼은 건설 모드를 구축하는 플랫폼으로, 쉽거나 복잡한 모드를 구축하는 것이 여기서는 쉬운 방법입니다.
이 창에서는 미리 만들어진 3D 모델을 직접 가져올 수 있습니다.
또는 단일 축, 이중 축, 3축, 4축과 같은 사전 설정 모드를 드래그할 수 있습니다.
다음 단계:
1, 모드를 드래그합니다.
2, 매개변수 설정;
3. 각 축에 모터를 맞춰줍니다.
4, 저장.
매개변수 설정:

"구조" 메뉴에서 장치 마스터-슬레이브 관계를 설정할 수 있습니다.
디버그 플랫폼
(고급 액세스 – 권한이 있는 직원만 가능)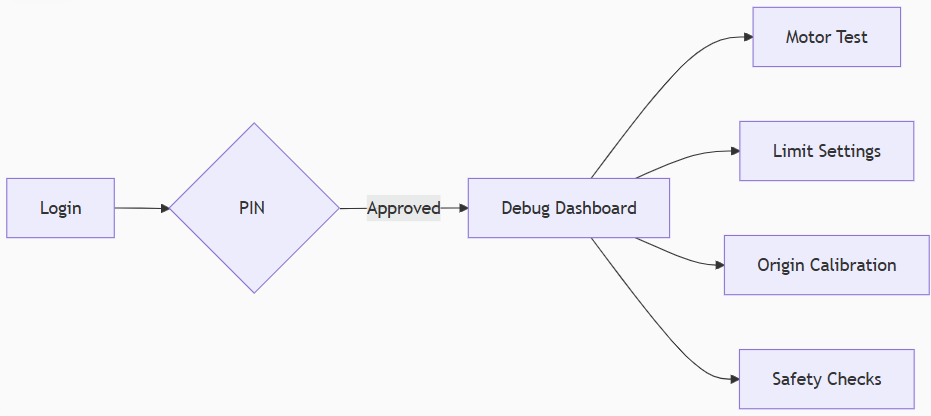
🔐 제한 모드: 시스템 엔지니어만을 위한 고급 액세스
⚙️ 중요 기능:
모터 테스트 실행 및 교정
리미트 스위치 구성
원점 설정
안전 회로 검증
✅ 무선 다중 장치 제어
실시간 원격 측정 기능을 갖춘 스마트폰/태블릿/컴퓨터를 통해 작동
현장 작업을 위한 WiFi 연결 지원
✅ 라이브 시스템 모니터링
그래픽으로 표시:
모터 위치/속도/토크
온도/전압/전류
EtherCAT 네트워크 상태
✅ 즉각적인 오류 경고
모바일 기기에 대한 푸시 알림:
위반을 제한하세요
통신 오류
과부하 조건
🛑 이중 인증 (비밀번호 + 하드웨어 키)
📊 감사 추적: 타임스탬프/사용자 ID와 함께 모든 매개변수 변경 사항을 기록합니다.
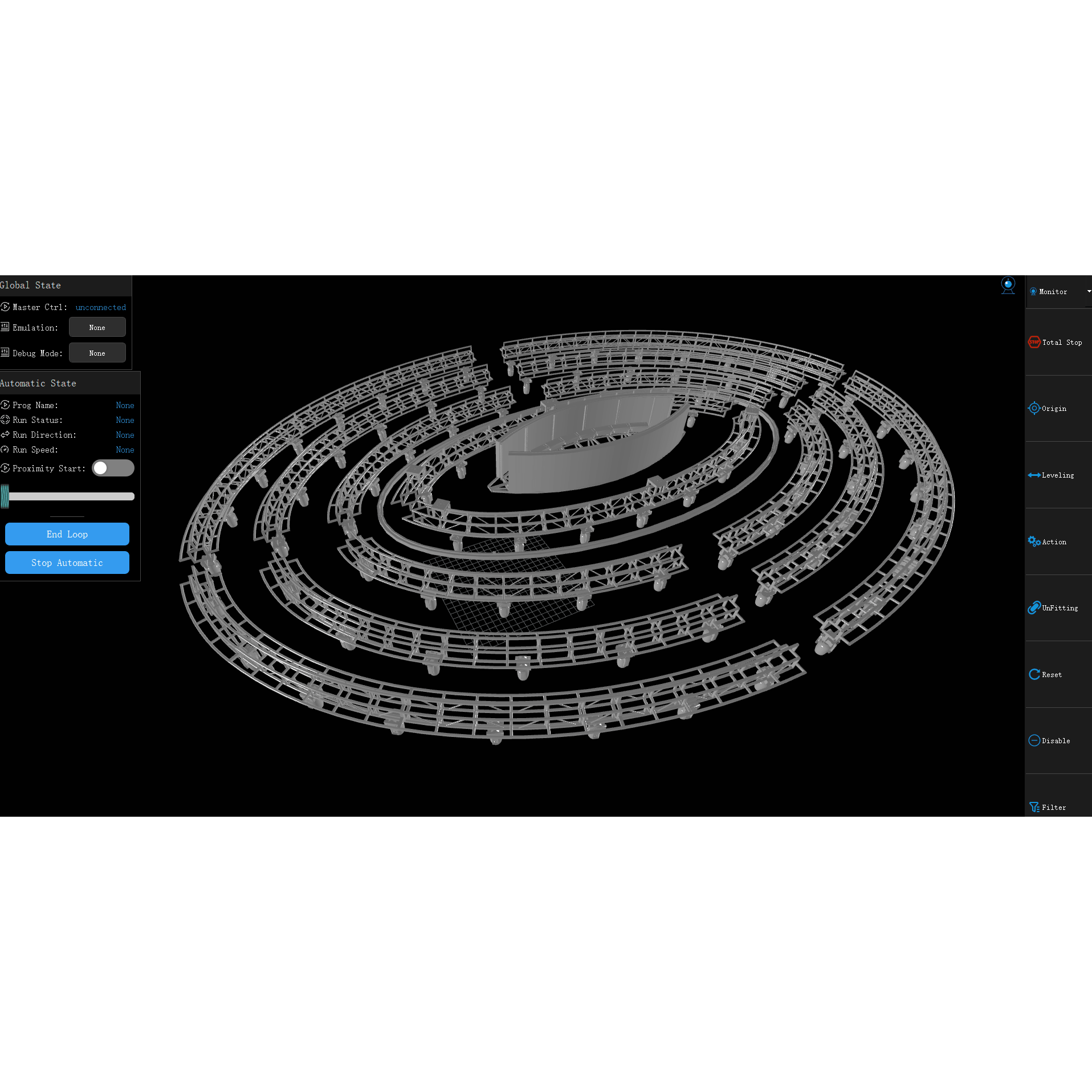
운영 플랫폼

목적: 설정/테스트를 위한 직접 모터 제어
기능:
위치 직접 입력
단일 축 이동에 대한 정확한 좌표(mm/°)를 입력하세요.
0.1mm 분해능의 실시간 위치 피드백
자세 회상
미리 저장된 위치("큐")를 실행합니다.
60개의 자세 사전 설정 지원
타임라인 기반 모션 디자인:
특징:
드래그 앤 드롭 키프레임 편집
곡선 보간 옵션:
선의
베지에(S-커브)
계단 함수
다축 동기화 마커
| DMX 채널 | 기능 |
|---|---|
| 1-16 | 자세 선택 |
| 25-32 | 자동 진행 |
| 멈추다 |
3D 뷰 및 실행 데이터

물리적 기계와 일치하는 동기화된 3D 모델 작동 상태를 확인하세요.
주요 모터 매개변수를 모니터링합니다.
위치
속도
하중 비율
온도
무게 값
알람 코드
여러 모터를 결합하여 간소화된 가상 제어를 구현합니다.
리프팅 매개변수
기울기 매개변수
회전 매개변수
복잡한 기계 시스템의 작동을 간소화합니다.
구성을 저장할 때 "모델 보호"를 활성화하세요.
자동 궤적 분석:
겹치거나 충돌하는 이동 경로를 감지합니다.
안전한 장비 작동을 보장합니다
실행 전 안전 경고를 제공합니다.
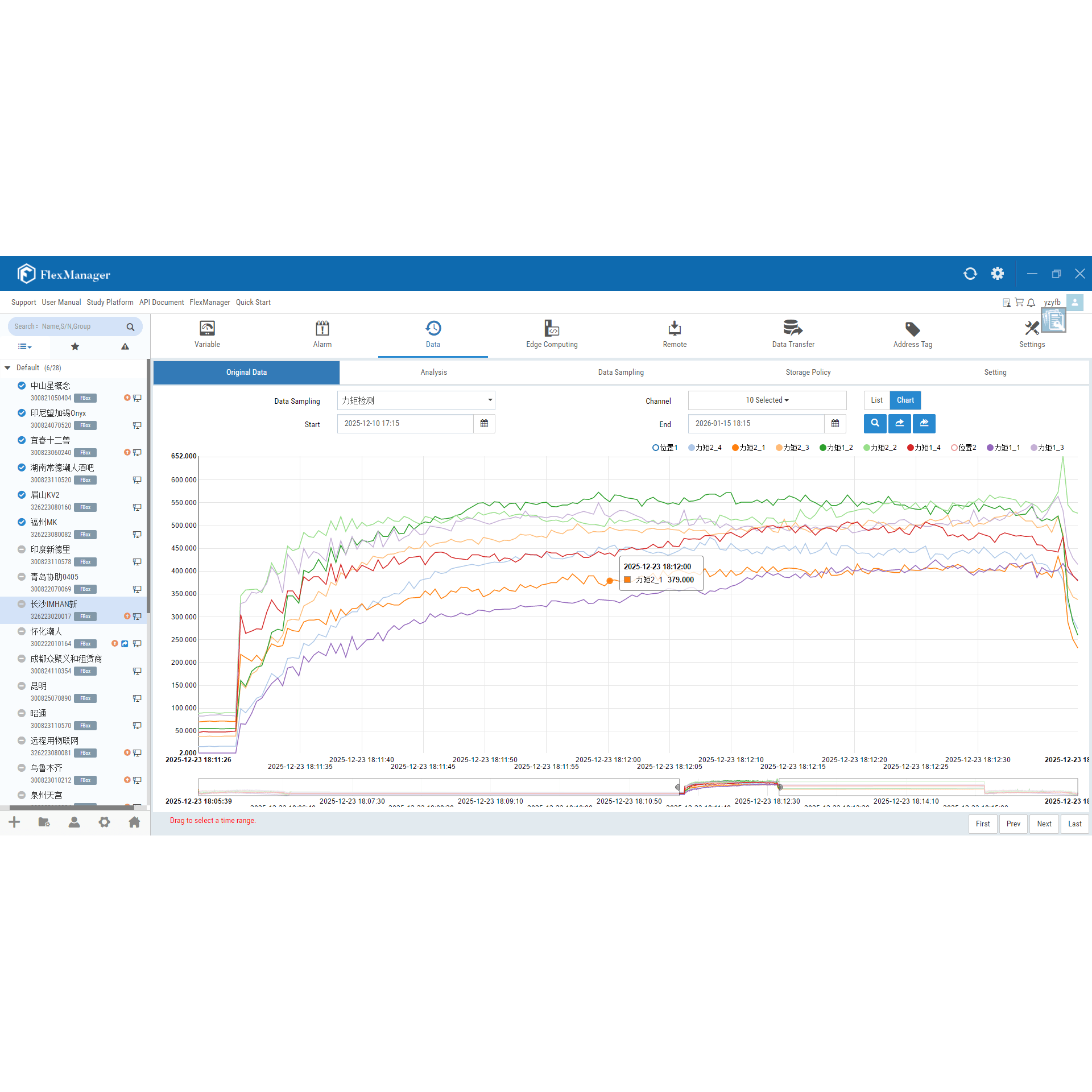
가상 및 물리적 모터 데이터가 나란히 표시됨
실시간 성능 모니터링
자동 편차 경고
기술적 장점
| 범주 | 사양 |
|---|---|
| 시스템 호환성 | 윈도우/리눅스 |
| 클라우드 스토리지 | 클라우드 기반 표준화된 기계 라이브러리에 저장된 프로그램 및 모델 |
| 구성 인터페이스 | - 모터 버스 토폴로지 설정 - 모션/제한 매개변수 구성 |
| 프로그래밍 인터페이스 | - 프리셋 모션 편집 - 타임라인 키프레이밍 |
| 작동 인터페이스 | - 모션 프로그래밍 - 자세 재생 - 절대 위치 지정 - 기계적 모니터링 |
| 액션 스토리지 | 프로젝트당 360개의 정적 모션 + 360개의 동적 모션 |
| 제어 용량 | - 최대 256축 - 링 네트워크의 128개 축 |
| 컨트롤러 지원 | 1개의 메인 컨트롤러 연결 |
| 위치 정확도 | 1mm |
| 시간 정확도 | 0.1초 |
| 언어 지원 | 중국어/영어 |

그만큼 BW 콘솔 무대 자동화를 혁신합니다. 최초의 통합 제어 단말기 결합:산업용 모션 제어 (0.1mm 정밀도)Pando 3D 시뮬레이션 내장 (가상-실제 폐쇄 루프 워크플로)임대 최적화 아키텍처 (플러그 앤 플레이 배포)핵심 장점1. 가상 및 실제 동기화, "3D로 디버깅하고 자신감을 가지고 실행하세요"오프라인 프로그래밍: Pando 3D에서 복잡한 장면을 미리 시각화합니다.가상 리허설: 물리적 기계를 움직이지 않고도 신호를 테스트합니다.실시간 조정: 현장 조정은 시뮬레이션과 자동으로 동기화됩니다.2. 검증된 신뢰성특징기술적 이점듀얼 모드 비상 정지EN 60204-1 Cat.0(정전) 및 Cat.1(제어 정지)을 준수합니다.광섬유 통신BW-MC™ 메인 컨트롤러까지 2km 이상 간섭 없는 신호 전송DMX512 통합조명 콘솔에서 원활한 트리거링(ArtNet/sACN 선택 사항)
세부
핵심 혁신: "확실히 시뮬레이션하고 정확하게 실행하세요"Pando 3D는 최초로 완전히 통합된 가상 제어 시스템으로 무대 자동화에 혁명을 일으키며, 위험 없는 사전 제작을 위해 물리적 서보 축(호이스트/리프트/턴테이블)을 프로그래밍 가능한 가상 요소로 변환합니다.주요 특징1. 디지털 트윈 기술1:1 축 매핑: 가상 공간에 256개 이상의 서보 모터 미러링충돌 방지: 적재 전 간섭 위험 감지예술적 미리보기: 조명/미디어 동기화를 통해 복잡한 움직임을 시각화합니다.2. 워크플로우 장점전통적인 방법판도 3D 솔루션몇 주간의 현장 디버깅오프라인 가상 리허설시행착오적 조정정확한 첫 번째 실행제한된 사전 시각화풀 3D 쇼 시뮬레이션
세부
블랙 워리어 스테이지 자동화 시스템의 지능형 코어시스템 개요개발자 YZ 디텍, BW-MC는 중앙 제어 뇌 전문 무대 장비의 경우 다음을 결합합니다.✔ 다축 동기 제어 (최대 256개 축)✔ 1밀리미터 미만의 정밀도 (±0.5mm 위치 정확도)✔ 임대 최적화 아키텍처 (모듈식 및 확장 가능)주요 특징1. 고급 모션 제어EtherCAT 기반 토폴로지(1ms 재생 빈도)가상 축 매핑 복잡한 궤적의 경우2. 지능형 관리모터 건강 진단온도/부하 임계값 알림3. 안전 생태계삼중 중복 비상 정지 회로(Cat.0/1/2)동적 한계 조정 작동 중
세부
무대 자동화를 위한 정밀 모션 컨트롤러제품 개요그만큼 BW-DC 드라이브 컨트롤러 고성능 모션 제어 장치입니다. 블랙 워리어 시스템YZ DITEC에서 전문 무대 장비용으로 설계했습니다. 다음 제품과 함께 사용하도록 설계되었습니다. BW-MC 서보 메인 컨트롤러 (무대 자동화 중앙 프로세서)는 다음을 제공합니다.다축 정밀 제어 서보 호이스트/윈치용신속한 배포 그리고 확장 가능한 구성 임대 시장을 위한실시간 모니터링 절대 엔코더 서보 모터주요 특징성능안전 및 제어✔ 유연한 레이아웃: 동기화된 동작으로 여러 실행 단위를 제어합니다.✔ 3중 안전: 하드웨어, 소프트웨어 및 메인 컨트롤러 보호 기능을 결합합니다.✔ 고정밀: 원활한 자동화를 위한 1mm 미만의 위치 정확도✔ 내장형 안전 모듈: 과부하 보호, 이중 브레이크 제어, 한계 감지✔ 실시간 데이터: 모터 위치, 속도 및 토크에 대한 지속적인 피드백✔ 패널 구성: 로컬 모터 매개변수 설정 및 상태 모니터링
세부
Black Warrior Automation Systems를 위한 강력한 전원 관리1. 전문가급 전력 분배균형 잡힌 부하 관리: 위상 불균형을 방지합니다계단형 디자인: 대규모 설치에 확장 가능2. 향상된 안전성이중 레벨 보호:자기 열 차단기비상 차단 스위치시각적 표시기: 위상 상태 LED3. 투어 준비 완료 구조플라이트 케이스 옵션:50mm 폼 패딩IP54 등급 커넥터
세부
 Tel : +86 13714472831
Tel : +86 13714472831 Email : ysstagetech@gmail.com
Email : ysstagetech@gmail.com No18, Wenchang road, Hailong street, Liwan district, Guangzhou, China
No18, Wenchang road, Hailong street, Liwan district, Guangzhou, China




 한국의
한국의 English
English español
español русский
русский العربية
العربية

 IPv6 네트워크 지원
IPv6 네트워크 지원